Seguinte: 4.2 Integração numérica e Acima: 4. Integração e derivação Anterior: 4. Integração e derivação Conteúdo
Dentre os métodos para encontrar raízes de uma equação utilizaremos o método de Newton-Raphson (NR). O método de NR é um método interativo recursivo, isto significa que um resultado depende do resultado anterior e assim sucessivamente. Na medida em que se encontra um resultado o método nos leva para uma raiz, assim a raiz que se deseja encontrar depende do chute inicial e do tipo da equação que se gostaria de estudar. O método NR é dado pela equação 4.1.1.
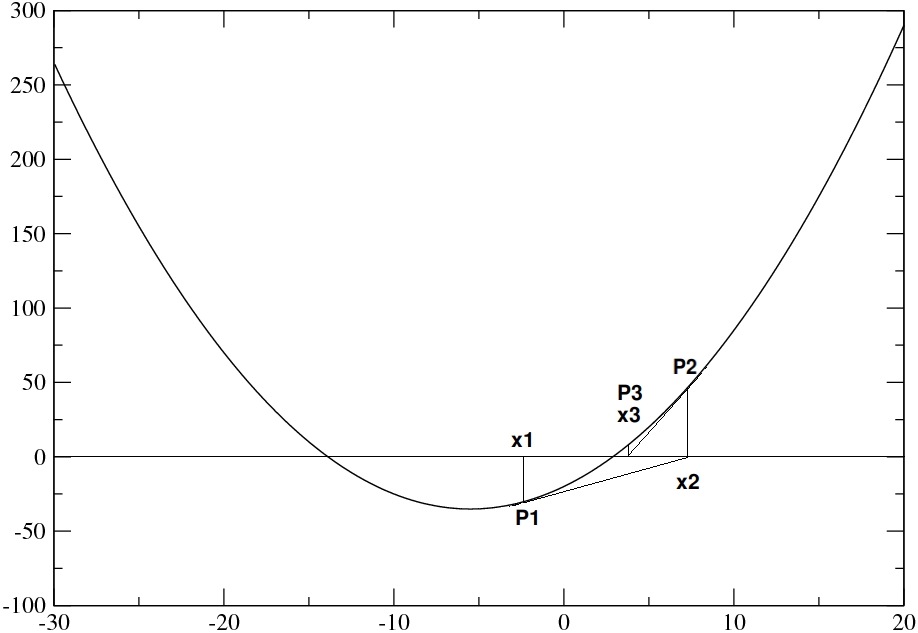
A representação gráfica pode ser dada pela figura 4.1.
Na figura podemos acompanhar os passos dados pelo método NR. Dado o valor de  , temos
, temos  ,
,  e
e  e assim encontramos o valor de
e assim encontramos o valor de  através da reta tangente que passa por
através da reta tangente que passa por  . Em um segundo passo com o valore de encontraremos o valor de
. Em um segundo passo com o valore de encontraremos o valor de  e por fim o valor da raiz dado por
e por fim o valor da raiz dado por  dentro de um critério de parada. É possível observar que cada passo o valor de
dentro de um critério de parada. É possível observar que cada passo o valor de  se aproxima da raiz e como podemos observar o chute inicial (o primeiro valor de é muito importante para o sucesso de se encontra a raiz. Outro detalhe é que para o método de NR é necessário saber a derivada de , ou seja, no ponto de .
se aproxima da raiz e como podemos observar o chute inicial (o primeiro valor de é muito importante para o sucesso de se encontra a raiz. Outro detalhe é que para o método de NR é necessário saber a derivada de , ou seja, no ponto de .
A derivada da equação pode ser encontrada basicamente de duas maneiras, uma delas é feita a mão, entende-se analiticamente e a outra forma numericamente. Muitas vezes a equação possui pontos de inflexão e acabam por não ser deriváveis em um ponto específico e até mesmo não sendo analíticas. No entanto um método numérico pode resolver alguns desses problemas, por exemplo o da derivada de um ponto de inflexão. Um desses métodos de derivação numérica em um ponto é o Método das Diferenças Finitas (MDF).
O método é simples e pode ser iniciado da seguinte forma: partindo da definição de derivada e assumindo que entre e
 podemos ter um segmento de reta definimos a derivada à direita de como:
podemos ter um segmento de reta definimos a derivada à direita de como:
assim a derivada à esquerda de é dada por:
As equações 4.1.2 e 4.1.3 para
 leva ao mesmo resultado, no entanto para
leva ao mesmo resultado, no entanto para  finito elas levam para aproximações distintas. A forma centradas das equações 4.1.2 e 4.1.3 geralmente é mais utilizada, tem a forma da equação 4.1.4:
finito elas levam para aproximações distintas. A forma centradas das equações 4.1.2 e 4.1.3 geralmente é mais utilizada, tem a forma da equação 4.1.4:
a forma acima é conhecida como MDF de primeira ordem. Pode ser utilizada também a MDF de segunda ordem como na equação 4.1.5.
Com a equação 4.1.1 temos o método de NR para encontrar as raízes de uma equação e com a equação 4.1.4 um método para encontrar a derivada de uma equação em um ponto desejado. Combinando as duas equações temos a forma final para encontrar raízes de uma equação totamlente numérica, dado pela equação 4.1.6.
Atividade: Iremos desenvolver um programa de forma mais genérica possível que encontre as raízes de uma equação utilizando o Método NR juntamente com o método MDF. Utilizaremos as equações:
Observações
, encontra-se e assim por diante. O critério de parada é dado pelo próprio usuário/desenvolvedor fazendo uma verificação entre passos. Quando uma diferença entre passos atingir valores menor que
 podemos assumir que o encontrado é um bom valor para a raiz. O valor da precisão é adaptável dependendo do tipo de problema no qual estamos trabalhando;
para o método de MDF que seja coerente com a precisão que está utilizando no método de NR;
podemos assumir que o encontrado é um bom valor para a raiz. O valor da precisão é adaptável dependendo do tipo de problema no qual estamos trabalhando;
para o método de MDF que seja coerente com a precisão que está utilizando no método de NR;